
焊接机器人的工作都是按照事先编制好的程序开展的,因此编程才是关键所在,由于编程不可能一步到位,焊接机器人需要在实际应用中不断的检验和改进,但有些技巧还是需要遵守的。
给焊接机器人编程的时候,须选择合理的焊接顺序,一般都是以减小焊接变形、焊枪行走路径长度来制定焊接顺序。而对焊枪空间过渡要求则是移动轨迹较短、平滑。而且,要不断调整焊接机器人各轴位置,合理地确定焊枪相对接头的位置、角度与焊丝伸出长度。工件的位置确定之后,焊枪相对接头的位置通过编程者的双眼观察,难度较大,与编程人员的经验有关。编程过程中还要及时插入清枪程序,这样可以防止焊接飞溅堵塞焊接喷嘴和导电嘴,保证焊枪的清洁,提高喷嘴的寿命,确保可靠引弧、减少焊接飞溅等,好处多多。
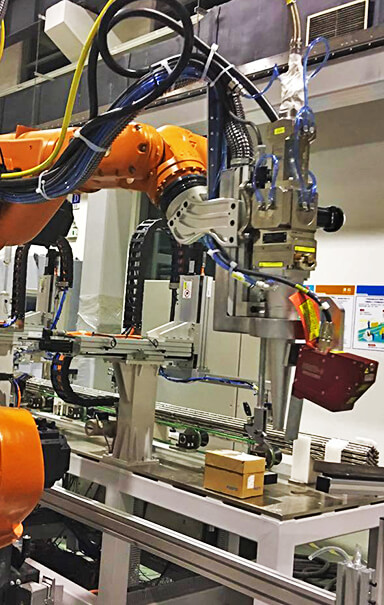
利用焊接机器人以及其他部件组装成了一台焊接机器人工作站,这其中机器人本体是核心的部分,除此之外,还有焊接电源、夹具、清枪系统、围栏以及变位装置、行走装置、回转平台等周边设备。将这些部件进行合理的组合设计,就能满足产品的不同特点和生产需求。
相比普通焊接设备来说,焊接机器人工作台明显的特点是精密、稳定、以不同的组合形式完成各种工件的焊接。因为在实际生产中,工件在焊接时需要变位,才能使焊缝处在较好的位置下焊接。对于这种情况,变位机的运动及焊接机器人的运动复合,焊枪相对于工件的运动才能符合要求。





